
劉丹
安科瑞電氣股份有限公司 上海嘉定201801
摘要:電動汽車用戶年齡段參差不齊,對于充電操作流程的閱讀和理解存在困難;支付平臺的不兼容也給用戶帶來了不便。針對存在的問題,結合常規充電樁的特點,兼顧無人駕駛車輛的充電問題,設計并開發了一套集成自動充電和手動充電于一體的新式充電設備,既能兼容現有的充電方式,又能針對無人駕駛車輛實現自動充電口對接、充電、扣費等操作,提高了充電智能化。實驗結果表明,該系統運行穩定,能夠解決充電操作不統一和付費平臺不兼容等問題。
關鍵詞:充電樁;無人駕駛車輛;自動對接;智能充電
引言
新能源電動汽車產銷與充電樁/站建造數量與日俱增,但在迅猛發展的同時也存在問題,比如:找充電樁難、付費方式不兼容、操作步驟不統一等。所以目前亟待研究出一種無人參與的新式充電設備,來解決市面上充電樁存在的問題。
另一方面,車輛無人駕駛技術發展日趨成熟,包括美國、日本、德國、中國等在內的和地區都在進一步加快無人駕駛領域的布局[1-2]。文獻[3]開展了無人駕駛車輛智能水平評價研究。文獻[4,5]介紹了無人駕駛主要技術手段和發展現狀。可以看出,無論是從解決實際問題出發還是從技術儲備角度出發,研究針對無人駕駛車輛的充電技術都是很有必要的。
目前也有國內外部分學者針對電動汽車充電問題進行了相關研究。文獻[6]介紹了電動汽車充電相關的儀表校驗技術,文獻[7]開展了無人值守的智能充電樁的研究。文獻[8,9]探討了制約充電設施發展的主要原因以及產業建設研究。文獻[10]設計了智能充電樁嵌入式控制系統。但是目前關于充電樁的研究都只針對普通電動汽車,尚不能滿足自動駕駛的電動車輛充電問題。
本論文立足技術創新,提出一種新式充電樁,該充電樁集成手動充電和自動充電于一體,手動充電兼容現有的電動汽車充電方式,自動充電方式則為無人車的充電問題提供解決方案。
一、系統整體設計
充電服務系統包含了運營管理平臺、云端、用戶APP、充電樁、電動車輛,如圖1所示。
常規的電動汽車,車主駕駛車輛進入充電區域后,可以自行插拔充電槍,并刷卡認證從而進行充電;而無人駕駛車輛則先進行車輛自動識別,然后通過自動對接技術來完成充電槍與充電口的識別與插接工作,從而進行充電操作。
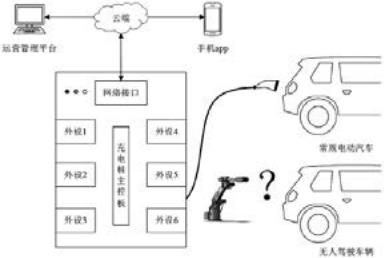
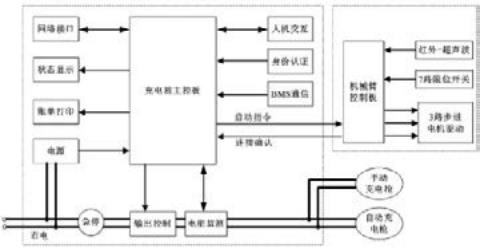
圖2無人充電樁硬件結構圖
二、安科瑞充電樁運營管理平臺
1、系統架構
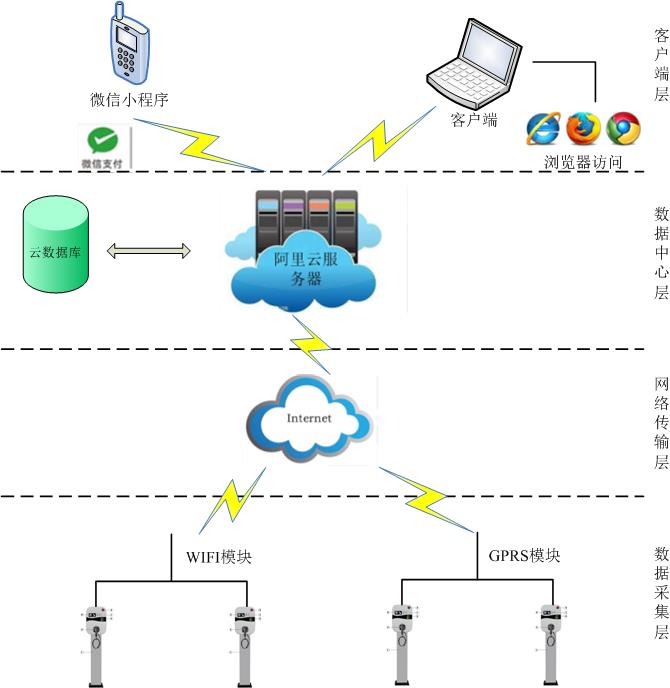
安科瑞Acrelcloud-充電樁收費運營云平臺系統通過物聯網技術對接入系統的充電樁站點和各個充電樁進行不間斷地數據采集和監控,同時對各類故障如充電機過溫保護、充電機輸入輸出過壓、欠壓、絕緣檢測故障等一系列故障進行預警;通過微信小程序掃描二維碼,進行支付后,系統發起充電請求,控制二維碼對應的充電樁完成電動汽車的充電過程。
充電樁可選配WIFI模塊或GPRS模塊接入互聯網,配合加密技術和秘鑰分發技術,基于TCP/IP的數據交互協議,與云端進行直連。云平臺包含了充電收費和充電樁運營的所有功能,具體功能如下:
資源管理:充電站檔案管理,充電樁檔案管理,用戶檔案管理,充電樁運行監測,充電樁異常交易監測。
交易結算:充電價格策略管理,預收費管理,賬單管理,營收和財務相關報表
用戶管理:用戶注冊,用戶登錄,用戶帳戶管理,消息管理
充電服務:充電設施搜索,充電設施查看,地圖尋址,在線自助支付充電,充電結算,導航等
微信小程序:掃碼充電,賬單支付等功能
數據服務:數據采集,短信提醒,數據存儲和解析
變壓器監控:監控充電站變壓器負荷,每個充電站配備一塊ARCM300T無線表,超負荷時系統自動對充電樁的進行調度管理,即當負荷超過百分之五十時,系統會限制新增開始充電的充電樁的功率,降為百分之五十,當變壓器負荷超過百分之八十時,系統將不允許新增充電樁開始充電,直到負荷下降為止。
2.1平臺登錄
在瀏覽器打開云平臺鏈接、輸入賬戶名和權限密碼,進行登錄,防止未授權人員瀏覽有關信息。

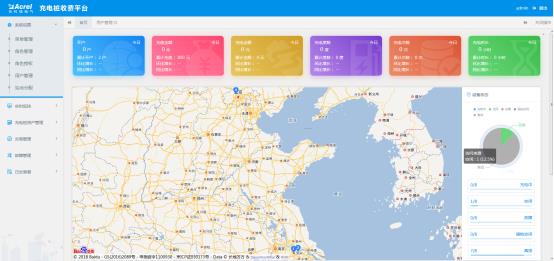
平臺首頁總覽每天的開戶數、充值金額、充電金額、充電度數、充電次數、充電時長,累計的開戶數、充值金額、充電金額、充電度數、充電次數、充電時長,以及相應的環比增長和同比增長以及樁、站分布地圖導航、本月充電統計。
2.3實時監控
充電站監控頁面監視用戶充電槍總數、正在充電的槍數、空閑槍數、插槍數量、故障槍數量等,匯總了用戶擁有各樁的當日充電總次數、總電量、總時長,進行負荷限制、故障查詢。

充電樁監控頁面充電槍的基本信息、今日充電電量、今日充電次數、今日充電時長和累計充電電量、累計充電次數、累計充電時長等、充電電壓電流等參數。

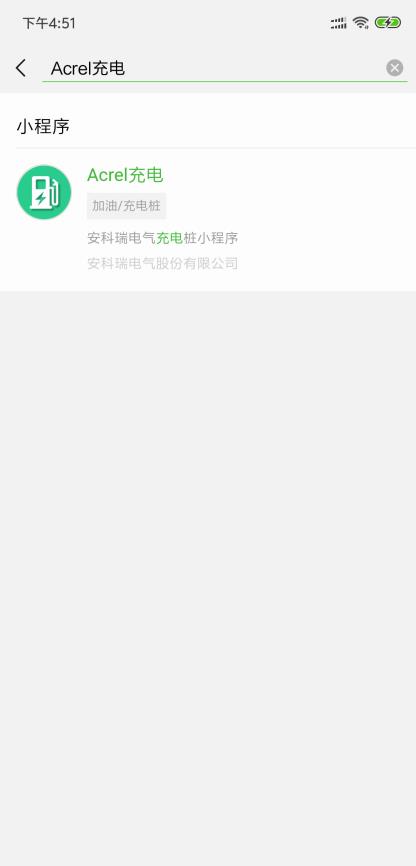
l 搜索與使用
微信小程序可以通過掃描二維碼和微信文字搜索找到,點擊后可以加入到小程序列表,如下圖所示


l 授權登錄界面
用戶通過搜索或者掃碼等途徑初次打開小程序時,會進入這個頁面,需要用戶授權登錄才可以進入小程序主功能頁面,如圖所示:


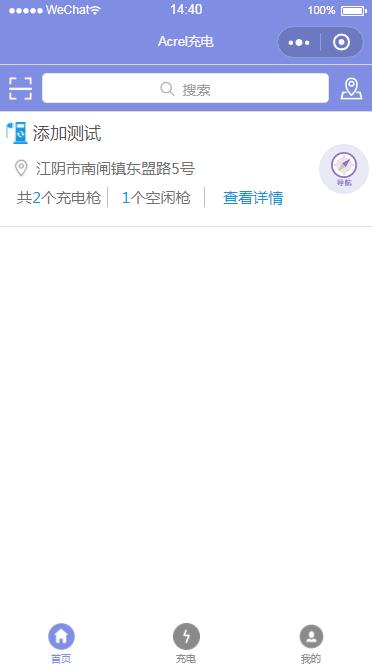
l 主功能頁
初次進入主功能頁時需要授權定位才可以使用地圖相關功能,在地圖上查看到當前所在區域的充電站,查看充電站信息,可以進行掃碼充電操作,地圖導航等。


l 充電
掃描充電槍上的二維碼,如果當前充電樁可用即可進入充電選擇頁面,可以查看到當前的充電站名稱、充電槍名稱,以及當前的賬戶余額,電價和預計可充電量等數據,還可以查看當前賬戶的歷史充電記錄。充電方式分為按時間充電、按金額充電、按電量充電這三種方式。充電結束可以進進行評價。



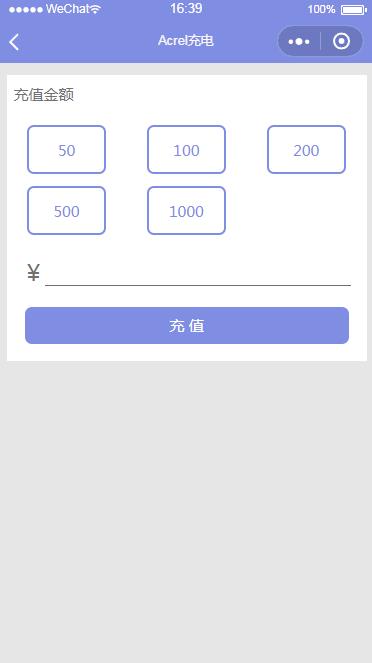
l 個人信息
個人信息可以顯示當前登錄賬號的昵稱和余額,同時包括、充值、充值記錄查詢、賬單查詢、充電記錄查詢、設置支付密碼等功能


3.1平臺服務器:建議按照我方推薦配置購買,或者客戶自己租用阿里云資源。
推薦硬件配置清單:(如申請阿里云可忽略)
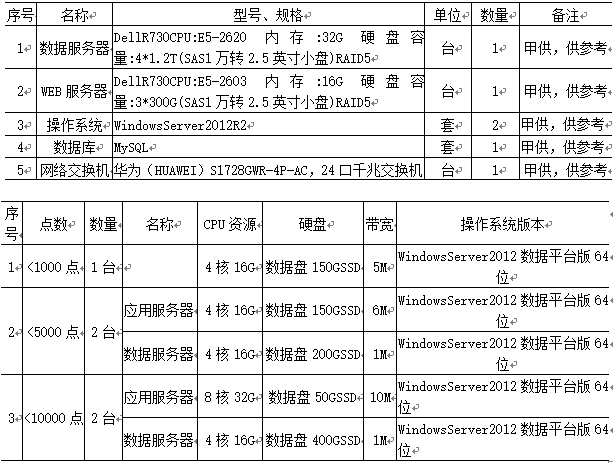
若客戶自己租用阿里云服務器,服務器配置根據充電槍點數的不同,分別如下:
3.2現場推薦硬件配置清單:

三、安科瑞限流式保護器的介紹與選型
1、限流式保護器的設計
電氣防火限流式保護器可克服傳統斷路器、空氣開關和監控設備存在的短路電流大、切斷短路電流時間長、短路時產生的電弧火花大,以及使用壽命短等當弊端,發生短路故障時,能以微秒級速度快速限制短路電流以實現滅弧保護,從而能顯著減少電氣火災事故,保障使用場所人員和財產的安全。
安科瑞ASCP200-1電氣防火限流式保護器的主要元件是固態開關,不同于傳統家用的空氣開關(微斷)。我們知道,傳統空氣開關的斷開是一種機械運動過程,分斷時間需要幾十毫秒(一般30~50ms),帶負載斷開時通常伴隨有電弧的產生。而固態開關的斷開則是依靠半導體內部的載流子運動實現,分斷時間微秒級,速度快,無電弧產生。
如圖1所示,當發生短路故障時,傳統空氣開關在電流升至C點時才能動作,且無法瞬時切斷電流,而固態開關則可以在電流升至B點時即瞬間切斷短路電流。
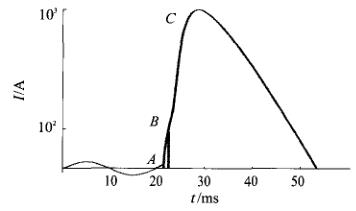
從流過電阻的電流熱量公式Q=I2Rt,可以很容易看出,傳統空氣開關與固態開關在短路時所釋放的能量差別可以達到數千倍之多。因此當裝配限流式保護器的回路發生短路故障時,就可以避免電弧的產生,從而降低了電氣火災。
2、ASCP200-1功能特點

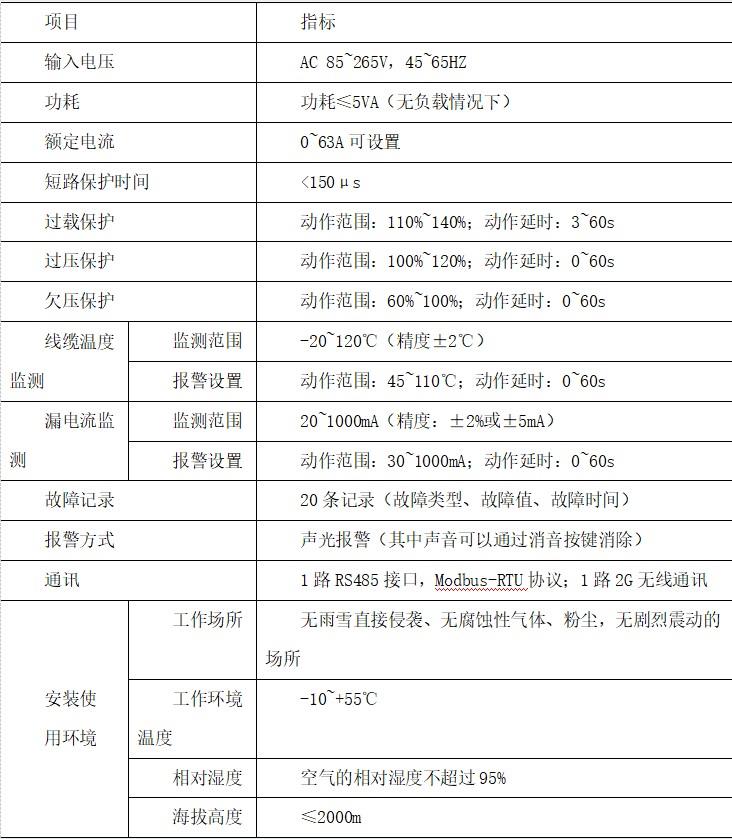
ASCP200-1型電氣防火限流式保護器是單相限流式保護器,較大額定電流為63A。主要功能如下:
A)短路保護功能,線路發生短路故障時,能在150微秒內實現快速限流保護;
B)過載保護功能,線路持續過載時,保護器限流保護;
C)表內超溫保護功能,保護器內部器件工作溫度過高時,保護器限流保護;
D)過/欠壓保護功能,線路欠壓或過壓時,保護器告警或限流保護(可設);
E)電纜溫度監測功能,被測線纜溫度超過報警設定值時,保護器告警或限流保護(可設);
F)漏電流監測功能,線路漏電超過報警設定值時,保護器告警或限流保護(可設);
G)通訊功能,保護器配置1路RS485接口,1路2G無線通訊,可以將數據發送到安科瑞Acrel-6000安全云平臺,或第三方監控軟件或平臺,從而實現遠程監控。
3、ASCP200-1技術參數
4、應用方案圖示
ASCP200-1型電氣防火限流式保護器建議安裝在入戶開關下端,額定電流值根據入戶開關的具體規格進行設置,典型應用示意圖如圖2所示:

圖2ASCP200-1家用防火解決方案安裝示意圖
5、使用注意事項
在選用限流式保護器時,限流式保護器的設定的額定電流應該與其前上級的斷路器的額定電流保持一致。例如,當限流式保護器輸入端斷路器的額定電流為32A時,應將限流式保護器的額定電流設置為32A。為保障限流式保護器的正常使用,嚴禁將其使用于與其前端斷路器的額定電流不匹配的配電線路中。
ASCP200系列采用限流式保護器采用壁掛式安裝,可以掛墻安裝,也可以安裝在箱體內,應確保安裝場所無滴水、腐蝕性化學氣體和沉淀物質,并注意環境溫度和通風散熱。
為確保可靠連接,接線時應按接線圖進行,同時為了防止接頭處接觸電阻過大而導致局部過熱,也避免因接觸不良而導致保護器工作不正常,線頭應采用合適大小的U形冷壓頭壓接后,再插入保護器相應端子上并將螺釘擰緊壓實。
保護器內部帶有交流電,嚴禁非人士擅自打開產品外殼。保護器在使用期間,若被保護線路發生短路或過載故障而被限流保護時,保護器仍處于帶電狀態,不允許隨意碰觸用電線路的金屬部分。待檢查線路,并排除故障后,長按保護器的復位按鍵約2秒鐘,使保護器恢復正常運行時。
當保護器因超溫而發生限流保護時,則可能是因為負載電流過大,環境溫度過高或通風散熱不良等原因導致,可通過加強通風等措施,等保護器溫度降下來后,再長按復位鍵,使保護器復位,恢復正常運行。
四、結束語
通過分析市面上的充電樁在服務過程中存在的不足,并結合無人駕駛技術的發展背景,本課題設計了一款集成手動充電方式和自動充電方式的新式充電樁。該新式充電設備既兼容現有的電動車輛,同時又可以為無人駕駛車輛直接提供充電服務,在一定程度上降低了充電樁更新換代的成本,為充電基礎設施的發展提供了新思路。
參考文獻
[1]端木慶玲,阮界望,馬鈞.無人駕駛汽車的先進技術與發展[J].農業裝備與車輛工程,2014,52(3):30-33.
[2]潘福全,亓榮杰,張璇,張麗霞.無人駕駛汽車研究綜述與發展展望[J].科技創新與應用,2017,(2):27-28.
[3]孫揚,楊賀.無人駕駛車輛智能水平等級劃分[J].科技導報,2017,35(17):80-83.
[4]AGUNBIADEOY,NGWIRASM,ZUVAT,etal.Improvinggrounddetectionforunmannedvehiclesystemsinenvironmentalnoisescenarios[J].InternationalJournalofAdvancedManufacturingTechnology,2016,84(9-12):2719-2727.
[5]NYJL,RIBEIROA,PAPPASGJ.AdaptiveCommunication-ConstrainedDeploymentofUnmannedVehicleSystems[J].IEEEJournalonSelectedAreasinCommunications,2012,30(5):923-934.
[6]朱莉,王禹淇,張軼鵬.時分割脈沖調寬技術在電動汽車充電設施儀表校驗中的應用[J].自動化技術與應用,2014,33(3):66-68.
[7]王旭,齊向東.電動汽車智能充電樁的設計與研究[J].機電工程,2014,31(3):393-396.
[8]李良,郭藝.充電樁建設面臨的突出問題及亟待落實的政策[J].中國能源,2016,38(1):37-39,36.
[9]王潼,李平.中國新能源汽車充電基礎設施產業建設研究[J].汽車工業研究,2017,(1):4-9.
[10] 張曉軍,謝輝迪,許劍銳,許招陽.基于STM32的智能充電樁嵌入式控制系統設計[J].電子測量技術,2017,40(2):144-148李慧.民用建筑地下車庫充電樁配電設計解決方案
[11] 孫煒煊,陳毅,王帥,汪貴平.電動汽車無人充電樁設計與實現
[12] 安科瑞企業微電網設計與應用手冊.2020.06版
 聯系QQ:2880263320
聯系QQ:2880263320 聯系郵箱:2881392118@qq.com
聯系郵箱:2881392118@qq.com 傳真:18717707094
傳真:18717707094 聯系地址:上海市嘉定區馬陸鎮育綠路253號安科瑞
聯系地址:上海市嘉定區馬陸鎮育綠路253號安科瑞
掃一掃 微信咨詢
©2024 安科瑞電子商務(上海)有限公司 版權所有 備案號:滬ICP備18001305號-12 技術支持:智慧城市網 sitemap.xml 總訪問量:256887 管理登陸
